تاریخچه
تشخیص ستاره ها اولین بار برای تخمین وضعیت حسگر ستاره در سال 1969 توسط وگل ، سوسار و لوزالینو مطرح شد. این مسئله می تواند به صورت زیر توضیح داده شود: ابتدا، ساختن کاتالوگ راهنمای داخلی ستاره؛ سپس، استخراج ستارگان از تصویر کنونی گرفته شده توسط حسگر CCD یا CMOS؛ سر انجام تطبیق ستارگان محاسبه شده با ستارگان راهنما، که بدانیم کدام ستارگان در FOV حسگر هستند.
اولین نسل ردیاب های ستاره از طریق به دست آوردن تعداد کمی ستاره درخشان و مختصات صفحه کانونی این ستارگان به عنوان خروجی به کامپیوتر فضاپیما، مشخص می شوند. این مختصات ربطی به فضای لختی نداشت. در نتیجه هیچ اطلاعات وضعیتی به طور مستقیم فراهم نمی شد. شناسایی ستاره و تعیین وضعیت باید در خارج دنبال کننده های ستاره، انجام می شد. در دهه اخیر، در دسترس بودن میکروکامپیوترهای قدرتمند دارای شرایط لازم فضا، اجازه دادهاند تا ستارگان رصد شده در برابر یک کاتالوگ ستاره سفت افزار ذخیره شده، مقایسه شوند. در نتیجه چرخش از یک دستگاه مختصات لخت نسبت به دستگاه مختصات دنبال کننده ی ستاره، می تواند به طور مستقیم محاسبه شود. اخیراً تحقیقات زیادی در نوع دوم ردیاب های ستاره برای کاهش پیچیدگی و قیمت پیاده سازی انجام شده است. ردیاب های ستاره ی اولیه از فن آوری IDT استفاده می کردند که در آن نور ستاره از سیستم نوری توسط فوتوکاتد به یک پرتو الکترونی تبدیل می شد و سپس توسط سیم پیچ های منحرف کننده ی آهنربایی به اختلاف ولتاژ تبدیل می شد. اگر ولتاژ ضرب کننده توسط ضرب کنندهی فوتونی از آستانه مشخصی بیشتر می شد، ستاره شناسایی می شد. سخت افزار این نوع ردیاب های های ستاره مقاوم می باشد اما سنگین هستند و نیازمند ولتاژ بالا و توان بیشتر در مقایسه با حسگرهای دیگر می باشند. JPL در اواسط دهه ی هفتاد میلادی استفاده از آرایه ی CCD را برای ردیاب ستاره آغاز کرد. در این ردیاب ستاره ابتدا نور ستاره از حالت کانونی خارج می شد، سپس دیجیتالی می شد و از روش مرکز جرم یابی گشتاور-جرم برای بدست آوردن جهت های نور ستاره، به کار برده شدند.
در ردیاب های ستاره ی اولیه، داده به زمین انتقال داده می شد و تعیین وضعیت توسط افراد زمینی بعد از بارگزاری تصویر ستاره از طریق دور سنجی صورت می گرفت. به دلیل اندک بودن منابع مناسب روی برد و پیچیدگی شناسایی ستاره، تا اواخر دهه ی هفتاد، تشخیص ستاره (که یک فرایند تطبیق بین ستارگان در تصویر ستاره و ستارگان مرجع در کاتالوگ ستاره می باشد) به اندازه ای نرسیده بود تا اجازه ی تخمین وضعیت روی برد را بدهد. در دو دهه ی اخیر پیشرفت های چشمگیری در توسعه ی نرم افزار و سخت افزار ردیاب ستاره صورت گرفته است. به خصوص پیشرفت سریع تصویر برداری و الگوریتم های دیجیتال، قابلیت اطمینان خیلی بالا برای تعیین وضعیت روی برد با نرخ به روز رسانی سریع (Hz 100-30) را فراهم ساخته اند.
دنبال کننده های خودکار ستاره به سرعت در حال تبدیل شدن به دستگاه تعیین وضعیت غالب به صورت روی برد، در بیشتر فضاپیماها هستند. این امر به دلیل یکپارچگی ساده واحد خودکار مستقل و قیمت پایین در مقایسه با نسل اول دنبال کننده های ستاره یا دستگاه های تعیین وضعیت دیگر می باشد.
ردیاب های ستاره ی کنونی دارای نیازمندی های بسیاری از قبیل حجم کم، وزن کم، قیمت ارزان، توان مصرفی پایین، دقت بالا، نرخ به روزرسانی بالا، شناسایی اولیه سریع و به خصوص عملیات کاملاً خودکار، می باشند.

| 
|
مراحل تعیین وضعیت توسط ردیاب ستاره
1) گرفتن عکس از آسمان توسط دوربین ردیاب ستاره
2) استخراج ستارگان از تصویر با استفاده از الگوریتم مرکز جرم یابی
3) به دست آوردن یک سری از ویژگی ها از تصویر با توجه به مکان ستارگان
4) جست و جوی ویژگی های به دست آمده از، در پایگاه داده برای پیدا کردن تطبیق
5) تخمین وضعیت ماهواره با توجه ستارگان شناسایی شده در میدان دید ردیاب ستاره
مدهای عملکرد حسگر ستاره
یک حسگر ستاره در چند مد عمل می کند از جمله:
1) مد راه اندازی
2) مد تعیین وضعیت اولیه
3) مد ردیابی
4) مد خطا و بازیابی آن.
تفاوت بین مدهای 2 و 3 در این است که آیا دانش تخمین وضعیت موجود است یا نه. مد تعیین وضعیت اولیه همچنین مد گم شدن در فضا نیز نامیده می شود و زمانی اتفاق می افتد که یک حسگر ستاره شروع به کار می کند یا هنگامی که سیستم دچار نقض می شود. در تعیین وضعیت اولیه، تکلیف، انجام دادن شناسایی الگوی ستاره در میدان دید می باشد. در طول این فاز قابلیت اطمینان از شناسایی مهم تر از دقت اندازه گیری وضعیت می باشد. این امر اجازه ی مرور کارآمدتر کاتالوگ را در مرحله ی بعدی وقتی که جست و جو می تواند به منطقه اطراف محور محدود شود را می دهد. چون هیچ اطلاعاتی از وضعیت قبلی در دسترس نیست، شناسایی ستاره در کل آسمان نیاز است، تا یک وضعیت اولیه پیدا شود. معمولاً شناسایی می توانند در چند ثانیه صورت گیرد. هنگامی که یک وضعیت اولیه پیدا شد، حسگر ستاره به مد ردیابی برمی گردد.
مد عملیاتی معمول (مد ردیابی) فرض می کند که وضعیت کنونی، نزدیک آخرین وضعیت به روز رسانی شده (کمتر از یک ثانیه قبل) می باشد. از آن جایی که ردیاب ستاره فقط باید ستارگان شناسایی شده قبلی را در موقعیت های معلوم دنبال پیدا کند، وظیفه خیلی آسان تر می باشد.
الگوریتم ها
برای تولید کردن بهترین تطبیق بین الگوی ستارگان استخراج شده در میدان دید با پایگاه داده ی روی برد، الگوریتم های تشخیص الگوی ستاره ای (SPR ) زیادی پیش نهاد شده اند. الگوریتم های شناسایی ستاره به دو دسته، طبقه بندی می شوند: دسته اول تمایل به تشخیص ستاره از طریق تناظر زیر گراف دارند. دسته دوم تشخیص ستاره را یک مسئله ی شناسایی الگو در نظر می گیرند. در دسته اول، با ستارگان مانند رأس های یک گراف رفتار می شود که گوشه ها، مشابه جداساز زاویه ای بین ستارگان همسایه هستند. این الگوریتم ها، از قبیل الگوریتم چندضلعی و الگوریتم تطبیق گروه، بیشتر از فاصله جفت ستارگان برای شناسایی استفاده می کنند. در دسته دوم، به هر ستاره یک الگوی مناسب نسبت داده می شود که می تواند توسط میدان ستاره مجاور، تعیین شود. الگوریتم مشبک ، الگوریتم شبکه ی عصبی و الگوریتم ژنتیک از این دسته می باشند. الگوریتم مشبک بیشتر تمایل دارد تا از طریق تشخیص الگو یا بهترین تطبیق به شناسایی ستاره برسد چون هر ستاره در این کلاس یک الگوی منحصر به فرد دارد، به شرط آن که الگوها به اندازه کافی نزدیک باشند پیدا کردن نزدیک ترین الگوی مجاور برای شناسایی ستاره کارا می باشد. ساختار داده ای که اغلب استفاده می-شود برای آسان پیدا کردن بهترین تطبیق الگو شامل جدول های مراجعه و درهم می شود، مانند شناسایی ستاره ناشی از میدان دید کوچک با استفاده از تئوری انتخاب بیزین . در روش تئوری انتخاب بیزین، الگوریتم مشبک با یک دسته بندی کننده بیزین ترکیب می شود تا الگوی ستاره از کاتالوگ روی برد که بهترین تطبیق را با تصویر حسگر کنونی دارد را انتخاب کند و تصمیم بگیرد که آیا تطبیق به اندازه کافی خوب است یا نه تا بتواند بدون شبه آن را تشخیص دهد. در الگوریتم شبکه عصبی تصاویر FOV به عنوان الگوهایی که میتوانند به طور مستقیم تشخیص داده شوند، رفتار می شوند. چون ساختار شبکه های عصبی شامل اطلاعاتی در باره ی بردارهای مشخصه ستاره می باشد. مانند استفاده از شبکه های عصبی برای هدف یابی وضعیت اولیه. در روش استفاده از شبکه های عصبی، بعد از آموزش دادن شبکه، ساختار شبکه شامل اطلاعات ستاره ها و میدان های ستاره در وزن های هر پیوند عنصر پردازش کننده می باشد. استفاده از شبکه های عصبی می تواند باعث کاهش زمان پردازش، تقریبا مستقل از وضعیت اشاره گر حسگر شود. همچنین استفاده از یک ساختار شبکه ای مناسب سبب ذخیره فشرده تر اطلاعات مرجع نسبت به پایگاه داده کلاسیک می شود. شبکه های LQV به دلیل این که معمولا برای حل مسئله های طبقه بندی به خصوص برای تشخیص شیءهای استخراج شده از تصاویر به کار می روند، استفاده شده است.
بافل حسگر ستاره( star sensor's baffle)
بافل حسگر ستاره( star sensor's baffle)
بافل یکی از مهمترین بخش های حسگر ستاره است که می تواند در اشکال مختلف مانند مخروطی، استوانه ای ویا سایر اشکال پیچیده وجود داشته باشد. مهمترین وظیفه این بخش تضعیف یا دور کردن پرتوهای ناخواسته ای است که از اجرام فضایی مانند خورشید، ماه، زمین، و یا حتی بدنه خود ماهواره به سمت سیستم الکترواپتیکی حسگر ستاره می آید. پره ها ساختارهایی هستند که درون بافل قرار می گیرند تا بر ویژگی های پراش نور تاثیر بگذارند. بافل ها در سیستمی که پره های آن به خوبی طراحی شده باشند نقش مهمی در دفع پرتوهای خارج محوری با زوایای بزرگ نسبت به محور سیستم اپتیکی حسگر ستاره ایفا می کنند. کارایی حسگر ستاره تابع عملکرد بافل است و معمولا بافل، پرتوهای ناخواسته را آنقدر تضعیف می کند که آن مقدار از پرتوهای ناخواسته که به سیستم اپتیکی حسگر ستاره می رسند بعلت تضعیف شدید توسط بافل، قابل اندازه گیری نیستند (به جز در مورد اجرام بسیار پرنور نظیر خورشید و زمین).
عمق کاواک بافل، فاصله بین پره های داخل بافل، زاویه بین بدنه بافل و پره ها ، زاویه لبه های بافل ، جهت گیری زاویه ای پره ها ، طول بافل و شکل هندسی آن از عوامل تاثیرگذار بر عملکرد بافل و تعیین-کننده ضریب تضعیف آن هستند. در ادامه تصویر حسگر ستاره به همراه بافل آن (شکل 1) آمده است.

شکل 1 حسگر ستاره به همر اه بافل آن
کارایی بافل می تواند بوسیله محاسبه ضریب کیفیت بصورت تابعی از زاویه ی پرتو نور ورودی به بافل با جهت مثبت محور اپتیکی تخمین زده شود. با بکارگیری نرم افزارهای MATLAB یا C# برنامه ای با استفاده از الگوریتم مونت کارلو نوشته می شود تا دیفیوژن، بازتابش و جذب از سطوح داخلی بافل را شبیه سازی کند. برنامه مورد نظر با ردیابی مسیر پرتو، اثر پراش از سطوح داخلی بافل را با استفاده از الگوریتم مونت کارلو، و اثر بازتابش را با مشتق گیری از معادله سطوحی که پرتو نور به آن برخورد می کند، شبیه سازی میکند. شبیه سازی بازتابش با استفاده از قانون اسنل انجام خواهد شد و سپس برنامه مورد نظر تعداد بازتاب های ممکن برای هر پرتو را پیش از وارد شدن به سیستم اپتیکی و به ازای زوایای ورودی مختلف، و برای تعداد زیادی از پرتوها محاسبه خواهد کرد. محاسبه ضریب تضعیف با استفاده از ضرایب بازتابش، دیفیوژن و جذب که به نوع پوشش داخلی بافل و خصوصیات فیزیکی آن بستگی دارد انجام خواهد شد. محاسبات مورد نظر با این فرض انجام خواهد شد که پرتو پس از هربار بازتابش یا پراش همواره در صفحه عمود بر سطح باقی می ماند. پس از در نظر گرفتن دیفیوژن، جذب و بازتابش و بدست آوردن رابطه ی فاصله بین هر دو پره، رابطه ای بین قطر بافل و زاویه پرتو نور ورودی به بافل بدست می آید. از آنجایی که هردو این پارامترها مجهول هستند، بنابراین یک معادله با دو مجهول خواهیم داشت که دارای بینهایت جواب است. با کمک شبیه سازی به ازای زوایای مختلف برای بافل، مقدار بهینه قطر داخلی بافل، که در آن بافل دارای بیش ترین کارایی باشد تخمین زده می شود. پس از آن با توجه به شتاب پرتاب ماهواره و نیرویی که در طول پرتاب به بافل وارد می شود و محاسبه مقدار تنش وارده بر بافل، ضخامت مورد نیاز برای بدنه بافل با توجه به نوع آلیاژ انتخابی برای بافل و تنش قابل تحمل آلیاژ مورد نظر، محاسبه خواهد شد.
همان طور که اشاره شد به منظور تعیین دقیق موقعیت توسط حسگر ستاره، لازم است تصاویری با کیفیت بالا از ستارگان گرفته شود و تحقق این مهم نیازمند جلوگیری از ورود پرتوهای ناخواسته به سیستم الکترواپتیکی حسگر ستاره جهت افزایش کنتراست تصویر است. برای طراحی و ساخت بافل چند قاعده را باید درنظر گرفت:
هیچ یک از پرتوهای نور ناخواسته، نباید بطور مستقیم از بدنه بافل و پره ها (به جز لبه پره ها) به سیستم اپتیکی برسد.
هیچ یک از پره ها نباید وارد میدان دید حسگر ستاره شوند.
محل جای گیری پره ها باید طوری باشد که هر پرتو نور ناخواسته قبل از رسیدن به سیستم اپتیکی حداقل دو بار توسط بدنه بافل و پرهها دچار بازتاب شود.
تعداد پره ها باید مینیمم باشد.
ارسال ماهواره ها به فضا مستلزم صرف هزینه زیادی میباشد، بدین منظور سعی می شود تا حد امکان، حجم و وزن ماهواره کاهش یابد. برای تحقق این امر، لازم است برای ساخت بافل از موادی استفاده شود که علاوه بر سبکی، دارای استحکام کافی بوده و بتواند نیروهای وارده بر آن را تحمل کند. برای ساخت بدنه اصلی بافل از مواد مختلفی می توان استفاده کرد که مهم ترین آن ها آلیاژهای ویژه ای از آلومنیوم می باشند که در صنعت هوافضا کاربرد دارند. زاویه بین پره ها و بدنه اصلی بافل یکی دیگر از پارامترهای قابل تغییر در طراحی می باشد که بر ویژگی های بافل تاثیر دارد. معمولا زاویه بین پره ها و بدنه اصلی بافل با ردیابی مسیر پرتوها، داخل بافل و انجام شبیه سازی با نرم افزارهای شبیه سازی اپتیکی بدست می آید. جهت گیری زاویه ای پره ها می تواند به سمت بیرون یا داخل بافل باشد. گرچه معمولا ساخت پره هایی با زوایای غیرعمود بسیار سخت و طاقت فرسا می باشد. با افزایش تعداد پره ها، اگرچه ممکن است تضعیف کاهش یابد اما به علت اثرات پراش از لبه پره ها، کیفیت تصویر کاهش می یابد ضمن اینکه باعث افزایش وزن بافل نیز می شود. بنابراین باید محل بهینه ای برای جای گیری پره ها طوری محاسبه شود که علاوه بر به حداقل رساندن تعداد پره ها و کاهش اثرات پراش، تضعیف کافی نیز صورت گیرد، ضمن اینکه هیج پرتو نوری نباید بطور مستقیم بتواند از دیواره بافل به درون سیستم اپتیکی بازتاب کند. تعیین محل بهینه پره ها با ردیابی گرافیکی پرتوها درون بافل و با استفاده از قوانین تابش و بازتابش و محاسبه معادله ریاضی مسیر حرکت پرتوها و نقاط تلاقی آن ها با خطوط معرف زاویه میدان دید صورت می گیرد .روابط بین طول بافل و گشودگی دهانه بافل اولیه و ثانویه با پارامترهایی نظیر زوایای دفع زمین و خورشید و زاویه میدان دید را با برخی محاسبات هندسی می توان بدست آورد. سطح داخلی بافل باید دارای پوششی باشد که دارای دو ویژگی عمده باشد.
1- کاملا کدر و تیره باشد تا قابلیت جذب بالای پرتوهای نور فرودی به آن را داشته باشد.
2- زبر بوده و دارای ناهمواری های میکروسکوپی باشد بطوری که باعث افزایش پراش نور پرتوهای فرودی شود.
بههمین منظور برای برآورده ساختن چنین نیازمندی هایی می توان از روش آندایزینگ یا روش های دیگری استفاده کرد. به مجموعه عملیاتی که با تشکیل یک لایه نازک اکسیدی بر روی قطعات آلومینیومی باعث افزایش سختی، مقاومت در برابر خوردگی، و تغییر برخی از خصوصیات فیزیکی آنها می گردد آندایزینگ اطلاق می شود. قطعات و سطوح آلومینیومی را به دلایل زیر آندایزینگ می نمایند.
الف – افزایش مقاومت در مقابل خوردگی
ب – افزایش قدرت چسبندگی رنگ ها
ج – افزایش قابلیت تابش و انتشار حرارت
د – افزایش مقاومت سایشی
سخت افزار برد پردازشگر ردیاب ستاره
سخت افزار برد پردازشگر ردیاب ستاره
ردیاب ستاره سیستمی است جهت تعیین وضعیت ماهواره که اصول کار آن مطابق شکل1 می باشد. حسگر ردیاب تصاویر مختلفی از ستارگان در جهات مختلف تهیه می کند این تصاویر توسط آشکار ساز آشکار شده و به تصاویر دیجیتال تبدیل می شود. حال تصاویر آماده اند تا پردازش های لازم جهت حذف نویز و مرکزیابی و نهایتا تعیین وضعیت روی آن ها صورت بگیرد. پردازش های لازم توسط برد پردازشگر انجام می شود. ابتدا به یک سخت افزار نیاز است تا تصویر دیجیتال را از بخش اپتیکی(شامل دوربین و آشکارساز و لنزها و A/D ) تحویل بگیرد. برای این کار نیاز به سخت افزاری است که تصویر را به صورت بی درنگ تحویل گرفته و آن را جهت پردازش به قسمت های دیگر واگذار کند. برای این منظور می توان از یک برد FPGA استفاده کرد.
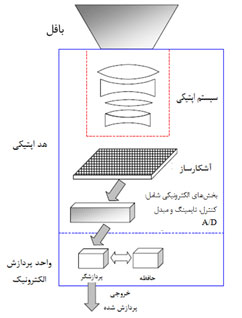
شکل1 نحوه عملکرد ردیاب ستاره
در مرحله بعدی یک میکروکنترلر نیاز است تا تصویری که FPGA در حافظه قرار داده است را برداشته و پردازش های لازم را روی آن انجام دهد. از آن جایی که فرکانس خروجی بالا می باشد بنابراین به یک میکروکنترلر با فرکانس کاری بالا نیاز است تا بتواند در این زمان خروجی مورد نظر که کواترنیون وضعیت می باشد را ایجاد کند. خروجی برد پردازشگر باید به کامپیوتر فضاپیما فرستاده شود تا فضاپیما بتواند جهت گیری مناسب را انجام دهد.
شکل2 ارتباط بین اجزای سخت افزاری و قطعات بکار رفته در یک معماری سخت افزاری را نشان می دهد.

شکل2 - معماری سخت افزاری ردیاب ستاره
همچنین از آن جایی که پردازش بر روی تصاویر صورت می گیرد می توان به جای میکروکنترلر از DSP برای این منظور استفاده کرد. شکل3 معماری سخت افزاری مربوط به این ترکیب را نشان می دهد.

شکل3 - ترکیب FPGA و DSP
الگوریتم ها:
برای ایجاد ردیابی موفق نیاز به دو دسته الگوریتم می باشد. این الگوریتم ها باید بر روی سخت افزار پیاده سازی شوند. یک دسته از الگوریتم ها، الگوریتم های محاسبه و تعیین وضعیت می باشند که عبارتند از :
• گرفتن تصاویر خام از حسگر تصویر
• آستانه گیری
• اریب زدایی
• مرکز جرم یابی
• تعیین وضعیت
• ردیابی
دسته دوم الگوریتم های مدیریتی هستند که عبارتند از:
• مدیریت مدهای مختلف ردیاب ستاره (مدهای: خاموشی ، آمادگی/ امنیت ، تعیین وضعیت ، ردیابی )
• ارتباط با کامپیوتر ماهواره
• کنترل برد
پروژه ها
پروژه ی اول
طراحی الگوریتم ، دیاگرام بلوکی و شبیه سازی آشکارساز ستاره به منظور تعیین سمت گیری زاویه ای مورد استفاده در حسگر ستاره
در دو دهه ی اخیر صنعت هوایی و ماهواره اهمیت چشم گیری پیداکرده است. امروزه فن آوری های جدید در حال آزمایش شدن توسط سازمان ها و دانشگاه ها هستند. به علت مزیت کوچک تربودن قطعات و ادوات الکترونیکی پروژه های کوچک مرتبط با صنعت ماهواره در دانشگاه در اقصی نقاط جهان تعریف می شوند. فن آوری های نوین از جمله، انرژی خورشیدی، پردازش تصاویر و روش های تعیین وضعیت ماهواره موضوعاتی هستند که در حال حاضر روی آن ها تحقیق می شود و هنوز به پیشرفت نهایی خود نرسیده اند. در این میان روش های تعیین وضعیت، به علت حساس بودن جهت گیری ماهواره، یکی از مهم ترین زمینه های پژوهش است. روند اصلی در این پروژه طراحی و شبیه سازی نرم افزاری برای حسگر ستاره است.تشخیص ستاره ها اولین بار برای تخمین وضعیت حسگر ستاره در سال 1969 توسط وگل ، سوسار و لوزالینو مطرح شد. این مســئله می تواند به صورت زیر توضیح داده شود: ابتدا، ساختن کاتالوگ راهنمای داخلی ستاره؛ سپس، استخراج ستارگان از تصویر کنونی گرفته شده توسط حسگر CCD یا CMOSو سر انجام تطبیق ستارگان محاسبه شده با ستارگان راهنما، که بدانیم کدام ستارگان در میدان دید حسگر هستند.حسگرهای ستاره با استفاده از وسایل مختلف برای مشاهده ی تصویر، راستای نور ستاره را اندازه گیری می کنند. یک ردیاب ستاره یک دوربین الکترونی متصل به یک میکروکامپیوتر می باشد. با استفاده از یک تصویر گرفته شده از آسمان، ستارگان می توانند مـــکان یابی و شناسایی شوند. جهت گیری فضاپیما براساس این مشاهدات می تواند تعیین شود. یک دنبــــــال کننده ی ستاره خودکار می تواند به طور خودکار شناسایی الگوهای ستاره را در میدان دید انجام دهد و وضعیت را نسبت به کره ی سماوی، محاسبه کند. شکل 1 طرح کلی یک ردیاب ستاره را نشان می دهد.

شکل 1طرح کلی یک حسگرستاره ی خودکار.
یک دنبال کننده ی ستاره خودکار دارای جرم 1 تا 7 کیلوگرم است و 5 تا 15 وات توان مصرف می کند. دقت آن در محدوده ی زاویه ی قوسی (1 arc second = 4.58μrad) و نرخ به روزرسانی بین 5/0 تا 10 هرتز است. انتظار می رود که با پیشرفت فن آوری توان مصرفی و جرم دنبال کننده های ستاره کاهش یابد. اما، از آن جایی که تعداد فوتون ها از یک ستاره محدود می باشد، بهبود قابل ملاحظه ای در نرخ به روز رسانی یا دقت انتظار نمی رود.همان طور که بیان شد روش های زیادی هم چون حسگر های خورشیدی، جاذبه سنج ها و مغناطیس سنج ها برای کنترل فضاپیما وجود دارد که دقیق ترین آن ها حسگر ستاره است. حسگرهای ستاره هم برای ماهواره ها هم برای فضاپیما های بین سیاره ای استفاده می شوند، که مهم ترین قسمت آن تعیین وضعیت و شناسایی ستارگان است. همان طور که در شکل 2 مشاهده می شود، روند کار به این صورت است که ابتدا ستارگان در تصویر مشـخص می شوند. بعد از این مرحله مرکز دقیق ستارگان محاسبه می شود و بعد از اجرای الگوریتم تطبیق الگو ستارگان مشخص شده شناسایی می شوند. این مراحل در فصول آینده توصیف خواهند شد.

پروژه ی دوم
بررسی، تحلیل و تعیین ویژگی های ساختار سیستم های آشکارسازی در تعیین وضعیت ماهواره







